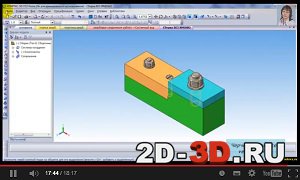
Библиотека анимации предназначена для имитирования сборки и разборки изделия кривошип. Создаём сборку и вставляем детали: плечо, палец, вал, шпонку, болт с шестигранной головкой, гайку, шайбу, задаем сопряжения соосности, совпадения и параллельности. Используя команду подвинуть компонент собираем всю сборку. Заходим в библиотеку анимации из менеджера библиотек. Жмем запомнить первоначальное состояние компонентов сборки. Добавляем компоненты, строим траектории, считываем положения. Делаем воспроизведение. Можем изменить параметры скорости передвижения. Сохраняем текущий сценарий.
Ролик с движением амортизатора
Построим элементы амортизатора и создадим анимацию перемещения и вращения гайки. Создадим все детали по очереди и сделаем ролик в формате видео
Анимация работы цепной передачи
Создание звездочек
Моделируем цепь и движение
Цепь ПР-8-4,6 с шагом между звеньями 8 мм. Числа зубьев звёздочек 15 и 10. Тяжело смотреть данное видео без озвучки, хотя и есть текст в уроке.
Осью вращения малой звездочки будет являться пространственный отрезок. Межосевое расстояние 53 мм. Наложим на звёздочки механическое сопряжение "Вращение/вращение" с передаточным отношением обратным отношению чисел зубьев звездочек (10:15 или 2:3). Приступим к проектированию траектории движения цепи. "Фиксируем" окружности размерами. Строем траекторию основной линией. Имитируем прогиб цепи под действием собственного веса. Задаём радиус только одного "провиса". Второй будет автоматически подстроен под длину цепи. Далее определяемся с точкой привязки первого звена цепи. Выполняем операции сплайн по объекту и точка на кривой. Точка на кривой покажет в каком месте Компас видит начало и конец замкнутого сплайна. Расставляем точки в которых будут находиться ролики цепи. Траектория подстраивается под длину цепи. В этой цепи 26 звеньев.
В цепи для нормального соединения должно быть четное количество звеньев. Вновь строим сплайн по объектам и привязываем его к его началу точку. Скрываем построенный эскиз. Создаем новый эскиз к которому будут привязаны звенья цепи. Проецируем в эскиз пространственную точку и сплайн по объектам. Вновь расставляем по траектории точки, не расстоянии друг от друга, равным шагу цепи. Создаём переменную "А", отвечающую за положение пространственной точки на сплайне. Приступаем к позвенной сборке цепи. Накладываем сопряжения: соосности ролика и точки эскиза, соосности соседних звеньев, совпадение плоскостей симметрии звена и звёздочки. Последнее звено мы не замыкаем с первым. Оно должно стать соосным последней построенной точке в эскизе. При этом первая и последняя точка у нас совпадают. Накладываем сопряжение соосности.
Приступаем к анимации. Сделаем так, чтобы цепь совершила полный оборот и звёздочки двигались синхронно с ней. Если цепь из 26 звеньев сделает полный оборот, то звёздочка с 15 зубьями повернется на угол: (26 звеньев х 360 градусов) / 15 зубьев = 624 градуса. Устанавливаем тот же интервал времени, что и для звездочки, и значения, в пределах которых, будет изменяться наша переменная.


 3. Делаем сборки в Компас-3D
3. Делаем сборки в Компас-3D 2. Видео уроки по моделированию в КОМПАС-3d
2. Видео уроки по моделированию в КОМПАС-3d 1. Видео уроки по Компас-3D, основные команды
1. Видео уроки по Компас-3D, основные команды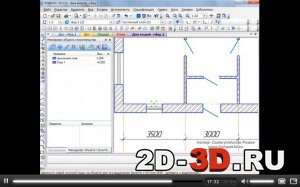 Строим дом в Компас-3d
Строим дом в Компас-3d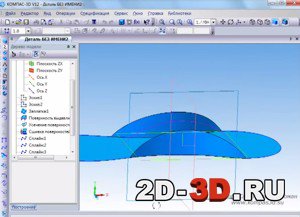 9. Новые уроки по Компас-3D сделанные в 2015 году
9. Новые уроки по Компас-3D сделанные в 2015 году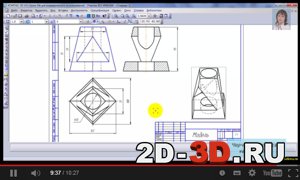 III. Разрезы деталей в Компас-3D по задачникам Миронова и Боголюбова. Бесплатные уроки.
III. Разрезы деталей в Компас-3D по задачникам Миронова и Боголюбова. Бесплатные уроки.